Xianhui Meng蒙贤辉M.S. Candidate
University of Science and Technology of China, Anhui, China |
Biography
I am currently a M.S. student in University of Science and Technology of China (USTC) ,
advised by Prof. Jun Liu.
My research interests focus on computer vision and embodied AI, especially 6D pose estimation and VLA.
I am a strong advocate of sharing🌱, collaborating🤝, advancing🚀, and innovating💡.
Passionate about bridging fundamental research with real-world impact, I strive to ensure my work contributes to both academic progress and practical value.
If you're interested in collaborating or would like to connect, feel free to reach out via email (邮箱:mengxh@mail.ustc.edu.cn) 😊
News
My current research focuses on the visual perception of articulated and flexible objects,
aiming to develop advanced 3D pose estimation methods to empower robots with fine manipulation and dexterous grasping capabilities.
While significant progress has been made in enabling robotic operation in idealized settings,
challenges related to robustness and adaptability persist in complex and unstructured environments such as underwater exploration, medical intervention, and industrial inspection.
In response to the unique perception demands posed by these scenarios, I am actively expanding my research into new directions,
with an emphasis on critical visual perception problems and corresponding solutions for underwater and medical robotics.
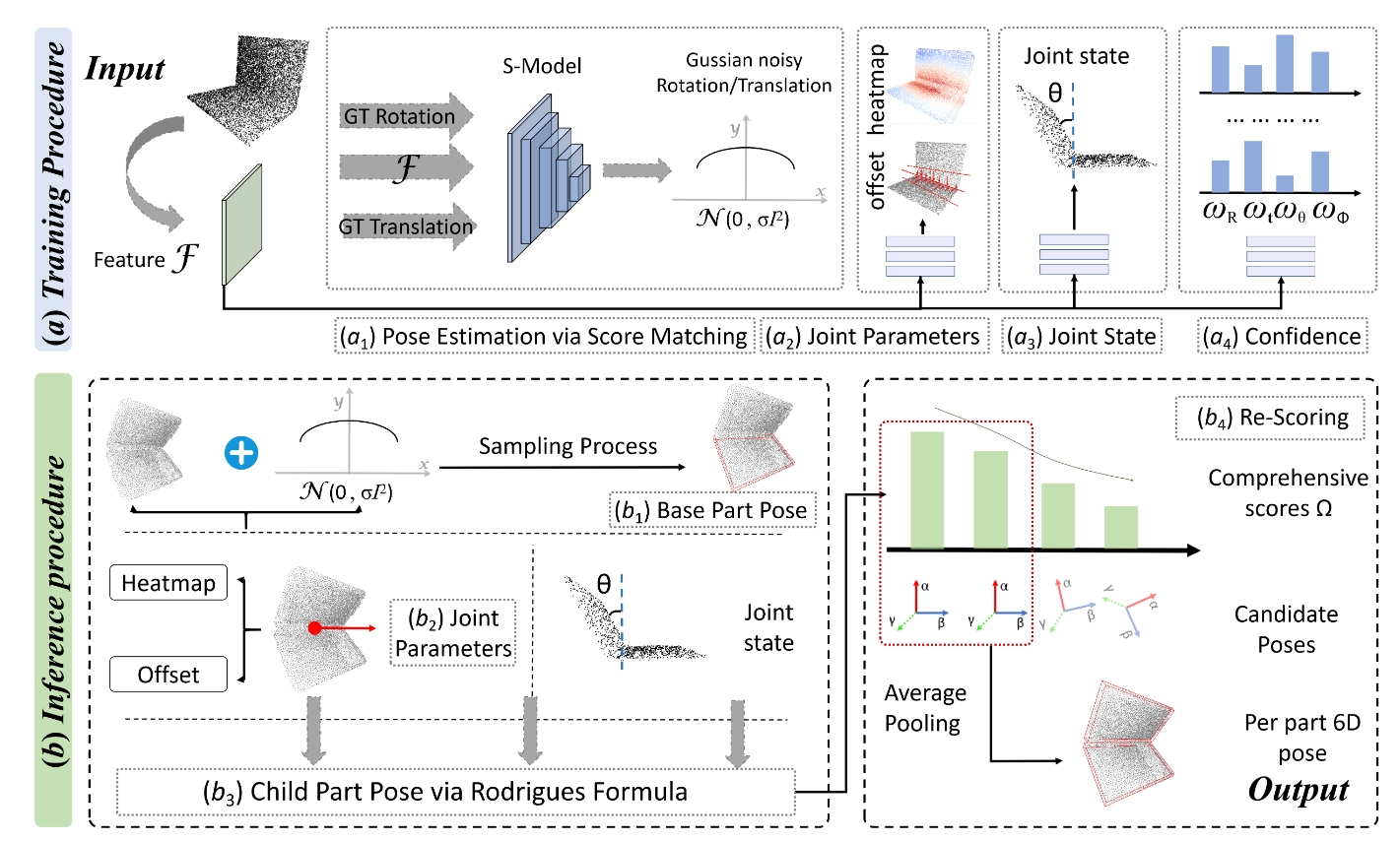
ICME 2025 Yukang Huo*, Xianhui Meng*, Li Zhang†, Haonan Jiang, Yan Zhong, Mingyuan Yao and Haihua Wang†
[Paper]
[BibTeX]
[Project/Codes]
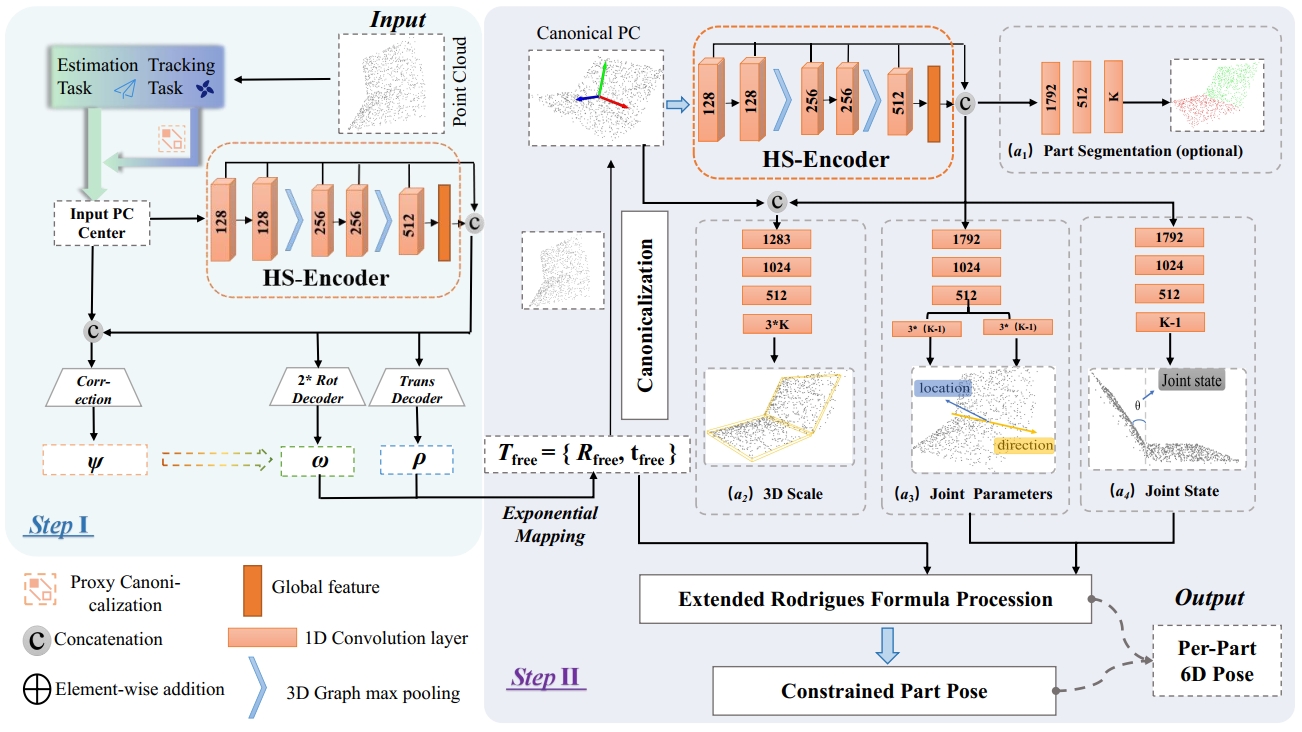
[TL;DR:] 6D pose estimation via diffusion model. TPAMI (under review) Li Zhang, Xianhui Meng, Liu Liu, Haonan Jiang, Jianan Wang, Rujing Wang, Cewu Lu, Jun Liu, Hong Zhang
[Paper]
[BibTeX]
[Project/Codes]
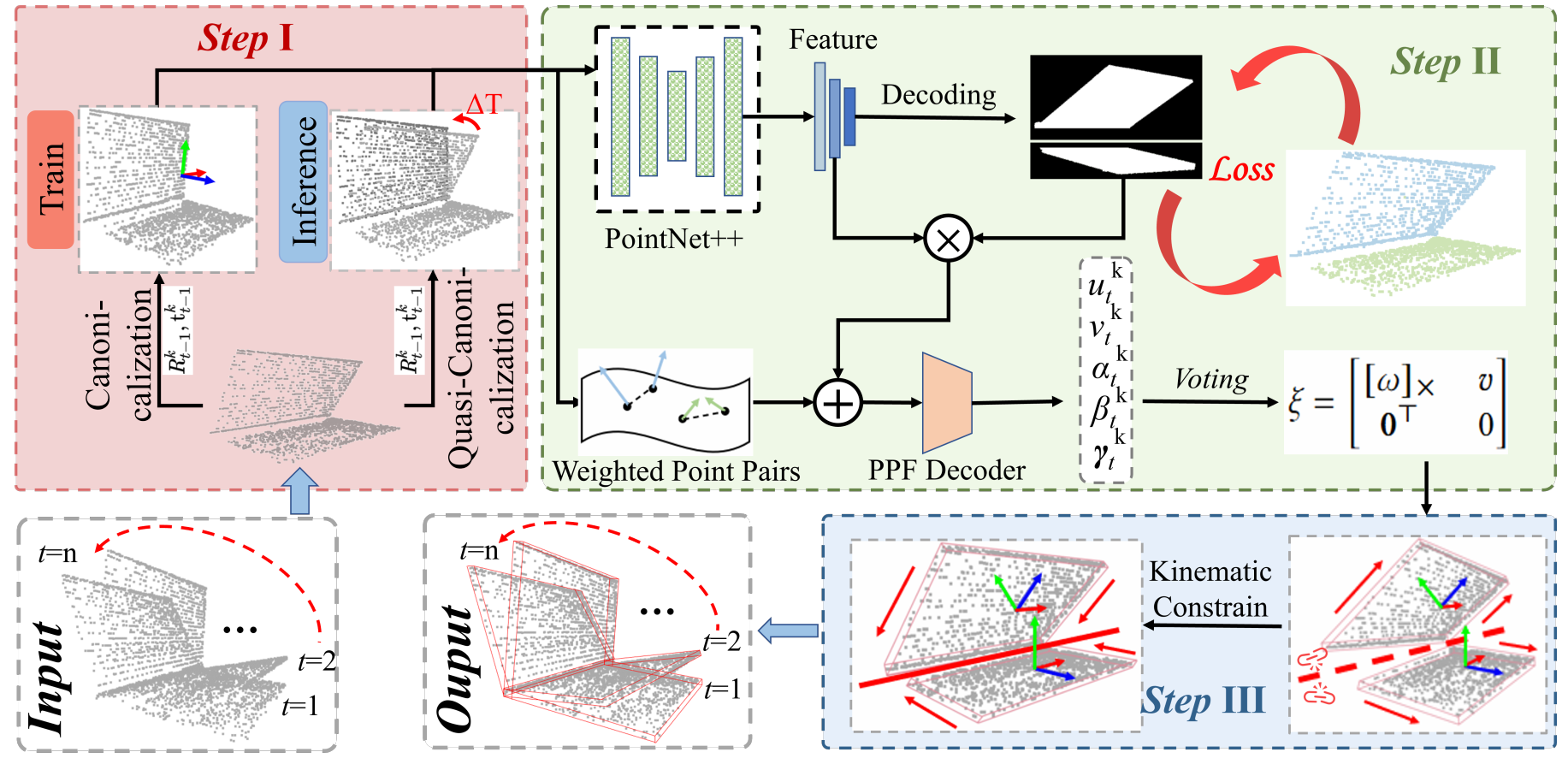
[TL;DR:] 6D pose tracking by Rotation Decoupled strategy. AAAI 2026 Xianhui Meng, Anonymous Authors
[Paper]
[BibTeX]
[Project/Codes]
[TL;DR:] Pose voting via SE(3)-invarient parameters.
Conference Service
Researches
Selected Publications
Education Experiences
Services